An a posteriori overview of our participation to MBZIRC2020
Now that MBZIRC is over, it is time to sum up and to tell about our adventure.
If we have to summarize our MBZIRC experience in one sentence this would be: "A series of technical issues and successful bug-fix". We had a lot of problems but thanks to the effort and commitment of the team we managed to find a solution to all the encountered problems.
Day 0: we discover that our material has not arrived yet. Fortunately, it is on its way and we will receive our robots in the afternoon. In a very well "organized rush" we set up our future "home" for the next 6 days. We prepared all the stations: charging, soldering, programming, etc., and we assembled our first drone. Now we are ready to work.


Day 1 - Rehearsal 1: Today's first day of rehearsal and we can access the outdoor arena for the first tests, although for only 15-20 min. Here the long list of problems starts. The first is a network problem: the GPS-base station does not connect to the network, which prevents the robot to receive the GPS-RTK correction. Once back to out team-tent we do several tests, we reconfigure the GPS-base station and we finally find an easy and effective solution.
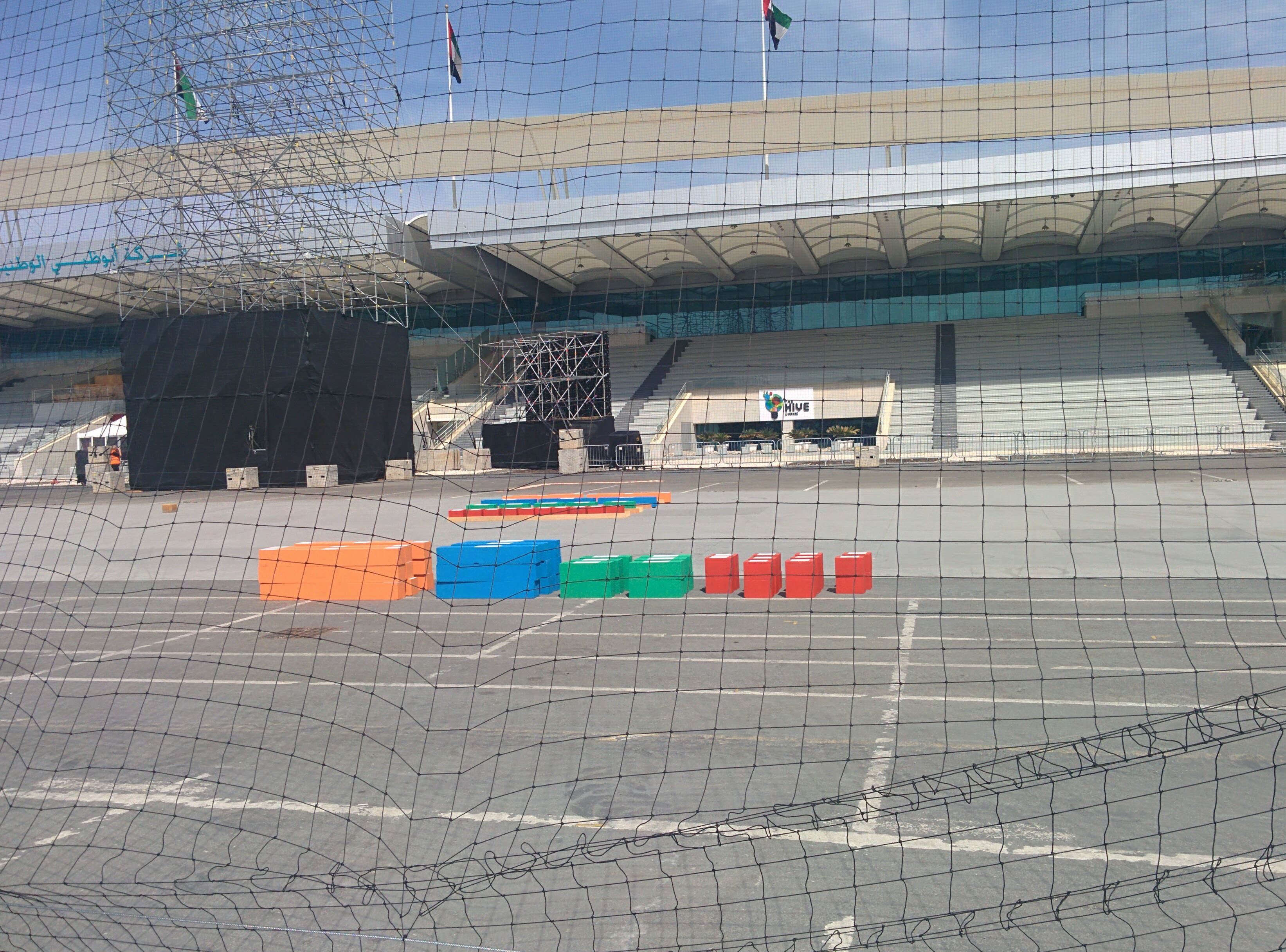

Day 2 - Rehearsal 2: The communication-network works, great! ... but ... the robot still does not receive the GPS-RTK correction. What can it be? We set-up an outdoor branch office to debug the problem. It takes the full day but finally (with the remote help of Anthony) we find the correct messages-configuration that allows the robot's GPS to be in RTK-fix mode. Even the rain (yes rain in Abu Dhabi!) tried to stop us but it did not manage to, we found the solution. Thanks to the MBZIRC organization, we were also able to test the GPS signal in the arena, finding out the best spot to place the GPS-base antenna: on the roof of the control tent! Robotics is also this :-)


Day 3 - Rehearsal 3: We are ready, the network works, the GPS-base station works, the robot is in RTK-Fix mode, let's try to fly! What ... the robot does not start. Ahhhh what is its problem now! Let's not loose hope and let's try to fix also this problem. It took several hours, one replaced flight controller and one replaced ESC but now our FiberTHex starts as normal. After a few tests indoor, it is time to get some rest and to get ready for tomorrow.



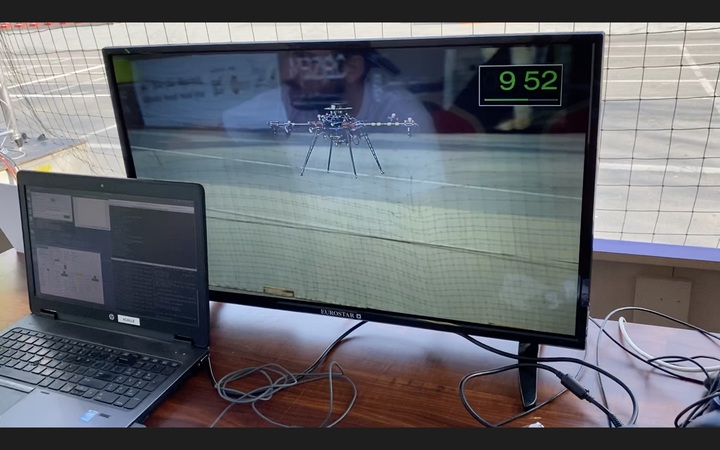
Day 4 - Competition 1: The expectations are high, we worked hard to fix all the problems, the robot must take off. Expectations will not be disappointed. The team was so happy and euphoric when the FiberTHex finally took off from the ground. Although this is already a big achievement, the time to celebrate is short. Yes, the robot now is flying, but we only managed to hover, changing the altitude. We dedicate the time left of the day to fix also this problem.


Day 5 - Competition 2: Will the code wrote yesterday night work? We enter the arena as gladiators, we are tired but fully committed to this last chance to show the great potentials of our robot and our hard work. The FiberTHex takes off as yesterday and after few resets, the robot started moving toward the bricks, YESSS!!! Now let's try to pick the brick. Once on top of the target, likely due to wind, the platform starts oscillating, it is not able to recover and finishes this great flight crashing hard on the ground. Too bad, but these are things that happen. We finished crashing our robot but what we managed to do right before is already a big win for us.
Regardless of the cold and rather meaningless numerical result, this competition has been for us an incredibly successful experience from many points of view, both from the technical and the human sides.
In less than one year and a half, we managed to set up a complete framework for outdoor experiments including an outdoor arena and a new fully-actuated platform design from scratch for outdoor flights (our FiberTHex).
We have all learned and grown a lot in these few days, and all along these years. The benefit of it will reverberate in our research activities all along the next years!
